Table of Contents
Introduction
Scenred2 is a fundamental update of the well-known scenario reduction software Scenred. A lot of new features come along with the latest release version. Beside updates and extensions concerning the control of the scenario reduction action an all new device for scenario tree construction has been implemented in Scenred2. Moreover, a lot of visualization functions to plot scenario trees and scenario processes linked to the free Gnuplot plotting software are available with Scenred2 now.
Table: Summary of basic new functions in Scenred2
| Description | Section |
|---|---|
| Additional options for controlling the scenario reduction | Scenario Reduction |
| New device of scenario tree construction | Scenario Tree Construction |
| Visualization of scenario trees and processes | Visualization |
| Command line interface and data export | Command Line Interface |
Using Gams/Scenred2
Successful applying Scenred or Scenred2 requires a special formulation of the stochastic programming model within the Gams program. Probabilistic information must be given by a set of nodes implying a certain ancestor structure including a well-defined root node. Note that the usage of Gams/Scenred2 is basically the same as the usage of Gams/Scenred. Hence, it is recommended for new users to look at the Scenred documentation first. All details about how to organize your Gams program, how to run Scenred from the Gams program by using the gdx interface, and, of course, examples can be found in that documentation.
The Gams/Scenred2 link provides the same gdx interface. But, due to new features some small changes in controlling the options are needed. Scenred2 supports now two types of option files. The first one is the SR-Command-File which must be passed to Scenred2 together with the Scenred2 call. The second one, the SR-Option-File includes more specific options to control the selected scenario reduction or scenario construction methods and can be declared in the SR-Command-File.
SR-Command-File
The command file includes the basic specifications. These are input/output gdx file names, the log file name, all other file names which are needed for diverse visualization and output options. It also includes the name of the SR-Option-File.
| Option | Description | Required |
|---|---|---|
log_file | specify a log file name | yes |
input_gdx | specify the gdx input file for Scenred | yes |
output_gdx | specify the gdx output file of Scenred | yes |
sr_option | specify a SR-Option-File | no |
visual_init | specify a name for visualization of input tree | no |
visual_red | specify a name for visualization of reduced/constructed tree | no |
plot_scen | specify a name for visualization of scenario processes | no |
out_scen | specify a file for scenario data output in fan format | no |
out_tree | specify a file for scenario data output in tree format | no |
Example:
Scenred2 must be called together with a command file, which contains at least all required options. The data exchange via the gdx interface and the Scenred2 call from the Gams program is of the form (be careful with the meanings and right order of gdx symbols):
execute_unload 'srin.gdx', ScenRedParms, n, ancestor, prob, random;
execute 'scenred2 scenred.cmd';
execute_load 'srout.gdx', ScenRedReport, ancestor=red_ancestor, prob=red_prob;
For example, the command file could be the following (note the compatible gdx file names):
* scenred command file 'scenred.cmd' log_file sr.log input_gdx srin.gdx output_gdx srout.gdx sr_option scenred.opt visual_red tree out_scen raw.dat
ScenRedParms
With the symbol list of the parameter ScenRedParms and the SR-Option-File all necessary information regarding the Scenred2 run can be assigned. The Gams parameter ScenRedParms can easily included to the Gams program by the statement:
$libInclude scenred2
Of course, the include must be stated before calling Scenred2. After that statement all supported parameters can be assigned, but at least all required parameters regarding the input scenarios. By the symbols of the parameter ScenRedParms you make also the decision of what features you exactly want to use with Scenred2. Moreover, some other usefull parameters for the Scenred2 run are included in the symbol list of the parameter ScenRedParms.
Table: Supported Scenred2 parameters in ScenRedParms
| Symbol | Description | Required |
|---|---|---|
num_time_steps | path length from root to leaf | yes |
num_leaves | leaves/scenarios in the initial tree | yes |
num_nodes | nodes in the initial tree | yes |
num_random | random variables assigned to a scenario or node | yes |
red_num_leaves | desired number of preserved scenarios or leaves | no |
red_percentage | desired relative distance (accuracy) | no |
reduction_method | desired reduction method | no |
construction_method | desired tree construction method | no |
num_stages | number stages | no |
run_time_limit | time limit in seconds | no |
report_level | report level: more messages by higher values | no |
scen_red | scenario reduction command | no |
tree_con | tree construction command | no |
visual_init | visualization initial tree | no |
visual_red | visualization reduced (constructed) tree | no |
plot_scen | visualization scenario processes | no |
out_scen | output of scenario raw data | no |
out_tree | output of scenario tree data | no |
To enable some options assign a value to the parameter. A parameter value of zero (default) disables an option. Note that when running Scenred2 either scenario reduction or scenario tree construction can be performed. Hence, only scen_red or tree_con should be used at once.
Example:
The following statements describe a possible example setup for proceeding the scenario tree construction with visualization of the scenario tree and output of the scenarios to a raw data file afterwards. Note that for the visualization and the scenario output the name of output files must be specified in the SR-Command-File. Otherwise a warning will inform you about not selected file names.
* general parameters
ScenRedParms('num_leaves') = 100;
ScenRedParms('num_nodes') = 200;
ScenRedParms('num_time_steps') = 5;
ScenRedParms('num_random') = 2;
ScenRedParms('report_level') = 2;
ScenRedParms('run_time_limit') = 30;
* execution commands
ScenRedParms('tree_con') = 1;
ScenRedParms('visual_red') = 1;
ScenRedParms('out_scen') = 1;
Scenred2 can also be used for plotting tasks only. Disable both the scen_red and tree_con option and use one ore more visualization options only (see also Section Visualization for more details regarding visualizations).
SR-Option-File
The SR-Option-File is the more specific option file and will be passed to Scenred2 by thesr_option statement specified in the SR-Command-File. It serves as control unit for available methods provided by Scenred2. The supported options depend on what kind of method is called with Scenred2. A detailed list of all options together with examples are given below for both the scenario reduction and the scenario construction devices (see Sections Scenario Reduction and Scenario Tree Construction, respectively). Note that certain parameters can be assigned by using both ScenRedParms and the SR-Option-File. In case of having parameters defined twice a warning by Scenred2 will generated to inform you.
Scenario Reduction
The scenario reduction device consists of approved methods for reducing the model size by reducing the number of scenarios in an optimal way. Here it doesn't make any difference whether the input data is structured as scenario tree or not. But note, the classical scenario reduction approach is actually developed for two-stage models. Extensions for the multistage case are planed in the near future. To learn more about the mathematical theory see, for example,
- H. Heitsch, W. Römisch, and C. Strugarek. Stability of multistage stochastic programs. SIAM Journal on Optimization, 17, 2006.
- H. Heitsch and W. Römisch. A note on scenario reduction for two-stage stochastic programs. Operations Research Letters, 35:731-738, 2007.
- H. Heitsch and W. Römisch. Scenario tree reduction for multistage stochastic programs. Computational Management Science, 6:117-133, 2009.
With Scenred2 the most popular and accurate reduction algorithms of forward and backward type are maintained further on. New options make it possible to proceed with the scenario reduction more individual. The most important new parameter is given by the option metric_type which allows to control the reduction process by different type of probability distances. Altogether three distances can be selected (see Table below). All probability distances are associated with a special order specification which can be set by the new option order. Both options replace the old option where_random which is not used any longer.
Table: SR Options - Scenario Reduction
| Option | Description |
|---|---|
red_num_leaves | desired number of scenarios (integer) |
red_percentage | relative accuracy (number from 0.0 to 1.0) |
reduction_method | 1 - Forward, 2 - Backward, 0 - Default |
metric_type | 1 - Transport (default), 2 - Fortet-Mourier, 3 - Wasserstein |
p_norm | choice of norm (example: 0 - max, 1 - sum, 2 - Euclidian) |
scaling | 0 - scaling off, 1 - scaling on (default) |
order | metric order (integer, default is 1) |
Example:
For example, a valid SR-Option-File is the following:
* scenred option file reduction_method 1 red_percentage 0.3 metric_type 2 order 2 p_norm 1 scaling 0
Lines starting with the star symbol (route symbol can be used too) provide comment lines. The star symbol can also be used to out comment and disable certain options.
Scenario Tree Construction
Scenario tree construction is the outstanding all new device of Scenred2. It allows to construct scenario trees as accurate input for multistage stochastic programs (cf. H. Heitsch and W. Römisch, Scenario tree modeling for multistage stochastic programs, Mathematical Programming, 118:371–406, 2009). The input are individual scenarios in form of a fan which must be allocated before calling Scenred2. A lot of options are offered to control the tree construction process. Note that in some cases due to sensibility of certain parameters some tuning is indispensable for producing good results.
Table: SR Options (basic) - Scenario Tree Construction
| Option | Description |
|---|---|
construction_method | 1 - forward, 2 - backward |
reduction_method | 1 - forward, 2 - backward, used within the iteration |
first_branch | time period of first branch (integer) |
red_percentage | relative accuracy (level from 0.0 to 1.0) |
eps_growth | 1 - linear, 2 - exponential |
eps_evolution | tree structure parameter (from 0.0 to 1.0) |
scaling | 0 - scaling off, 1 - scaling on (default) |
order | order of metric |
The Table above displays the main options to control the tree construction process. They are very similar to the reduction options. The role of the option red_percentage is here to prescribe a total epsilon accuracy (level) for the approximation scheme. But the approximation scheme is based on stagewise approximations which requires a splitting of the total level to the stages. Two strategies are offered by Scenred2 a linear and an exponential mapping of the total level to the intermediate levels. Use option eps_growth to select one of them. Both strategies allow a second tuning parameter eps_evolution which effects the slope of the epsilon splitting.
Even though this kind of control may generate good results for many applications, sometimes a more individual control can be needed. For example, some applications require a localization of branching stages. Moreover, to setup approximation bounds directly to stages can be very useful. To this end the standard options are extended by a new section environment.
Additional options - The section environment
An alternative control for the accurate constructions is provided by using the section environment. The section environment aims to establish a better monitoring of the construction process. There are overall three section types supported by Scenred2 with the same syntax.
Branching control:
This section environment allows to specify branching points, i.e., an explicit selection of stages serving for branching. For example, use
section branching 2 4 6 end
to allow branching only at time period 2, 4, and 6. Note that each stage statement must be placed in one line. But stages can be merged. A shorter formulation of the same contents can be written in closed form
section branching 2*6 2 end
This statement reads branching within time periods from period 2 to period 6 with increment 2 steps. Both assignments can be combined and should be used together with the red_percentage option.
Epsilon control:
In the similar way by the epsilon section it is possible to assign epsilon tolerances for the stage approximations explicitly. This environment overcomes difficulties at times coming across with the automatic epsilon control. Note that this environment disables the option red_percentage. For example, use
section epsilon 2 0.04 3*4 0.03 5 0.02 6 0.01 end
to control the approximation scheme by assigning different epsilon values per stage. Note that the value 0.03 is assigned to time period 3 and 4 in the example.
Node control:
The node control is the most specific control you have over the tree construction. With this environment the number of nodes of the tree which will generated can be assigned for each time stage explicitly. For example, use
section num_nodes 1 1 2*3 5 4*5 10 6 15 end
The syntax is the same as before. Note that only one section environment can be use at once. In particular, only the first section environment detected in the option file is used. The section environment can be out commented like a standard option too.
Experimental option:
There is one other useful option to speed up computations when building different scenario trees from exactly the same input data. In this case the scenario distances needed to compute the trees could be saved to a external file at the first run and reloaded at later runs. Hence, the distances must be calculated only once. For example, use the option
write_distance dist.sr2
to save the computed distances to the file 'dist.sr2'. To reload them at next run use the option
read_distance dist.sr2
The option is classified as experimental since no validation of the input file takes place. Before using this option, please ensure that the distances loaded with the read_distance option are the right ones.
Example:
Finally, look at the following example to see a valid SR-Option-File which can be passed to the scenario tree construction:
* tree construction option file construction_method 2 reduction_method 1 order 1 scaling 0 section epsilon 2*4 0.1 5 0.2 6 0.1 end
Example problems 'srtree.gms' and 'srpchase.gms'
Small example problems has been included to the GAMS Model Library.
The implementation can be found in the Gams programs 'srtree.gms' and 'srpchase.gms'. It might help you to practice in building scenario trees using Gams/Scenred2. The problem 'srtree.gms' converts a fan format scenario representation into a tree format representation and then reduces the tree size. The problem 'srpchase.gms' is to solve a simple stochastic purchase problem involving three stages. Sample scenarios which are generated from a fixed distribution using a random value generator serve as input for the tree construction.
Visualization
Visualization is another all new feature of Scenred2. In this section an easy way for making plots of scenario processes and tree structures is described. To this end you need the free Gnuplot software or any other plotting software which allows plotting directly from simple data files.
The concept of plotting tasks is the following. For each plot two files are generated, a Gnuplot access file (name.plt) and a raw data file (name.dat). The access file contains basic Gnuplot options and it can be adjusted for individual liking afterwards. The default output is the display. The supported plotting commands are
visual_init, visual_red, plot_scen
for plotting the initial tree structure, the reduced/constructed tree structure, and the scenario process(es), respectively.
Example:
For example, to visualize the constructed tree use the option
visual_red tree
within the SR-Command-File to specify the name for the output and activate the ScenRedParms parameter
ScenRedParms('visual_red') = 1;
in the Gams program. The result are the output files 'tree.plt' and 'tree.dat'. To compute the picture now you simply open the file 'tree.plt' with Gnuplot from the directory, where both output files are located (that should be the working directory). Alternatively, from the command line prompt call
>gnuplot tree.plt
Gnuplot will automatically generate the picture. Feel free to change any option in the Gnuplot access file for individual requirements. See also the Gnuplot manual for more details. In particular, to compute a well-scaled encapsulated postscript picture (eps), you simply have to uncomment a few lines in the Gnuplot option file above and to open it with Gnuplot once again.
With the command plot_scen the scenario process(es) can be visualized. Note that Scenred2 generates Gnuplot access and data files according to the number of random values.
Command Line Interface
The command line interface allows to run Scenred2 stand alone without using Gams. In this case the input for scenario reduction and scenario tree construction is handled by special input data files. The command file will be extended by the parameters having with the ScenRedParms otherwise.
To execute Scenred2 from the command line prompt together with a specified command file (which is required again), for example, call
>scenred2 command.file -nogams
To avoid diverse error messages do not forget the '-nogams' option to switch off the Gams interface. The command file can include some of the following options.
report_level <integer> runtime_limit <integer> read_scen <input file> scen_red <option file> tree_con <option file> visual_init <name> visual_red <name> plot_scen <name> out_scen <file name> out_tree <file name>
The denotation is not accidental the same as in case of using the Gams interface. The meaning of a certain option is maintained for the command line interface. To compute any scenario reduction or scenario tree construction the same SR-Option-Files are supported. It remains to clarify the data input format which comes across with the new read_scen command.
Data input format
To feed Scenred2 with data the scenario parameters must be passed by the read_scen command. Two types of input file formats are accepted.
a) The tree format:
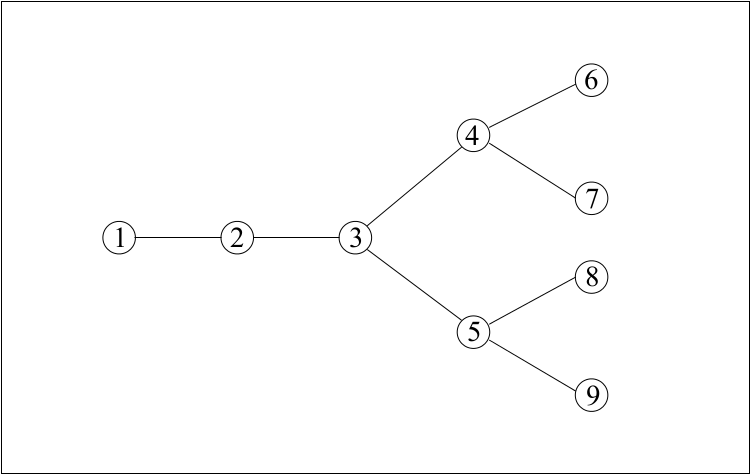
This file is a formated data file including all information of the input scenarios tree. It must have a header with dimension information and the scenario data separated for each node. The header includes the type declaration, the number of nodes, and the number of random values.
The data part starts with the key word DATA (do not forget). The tree data has to be ordered node by node. For every node the following information is expected separated by white spaces: The unique predecessor node (root node points to itself) followed by the node probability and followed by the assigned number of random data values. All information to one node should be written to one line (only for clearness reasons). Comment lines are allowed.
Match the following conventions:
- Nodes are identified by a sequence of integer numbers.
- The root node is expected to be the node '1'.
- The predecessor of root is '1' too, i.e., the root points to itself.
- All nodes numbers require a canonical order by stages and scenarios (see example).
Example:
# input tree example for scenred TYPE TREE NODES 9 RANDOM 4 DATA * PRED PROB RAND-1 RAND-2 RAND-3 RAND-4 1 1.0 42.5 9.1 7.5 120.0 1 1.0 39.8 11.2 8.4 90.0 2 1.0 37.6 14.0 6.3 110.0 3 0.5 38.9 12.4 8.1 130.0 3 0.5 35.7 13.8 7.5 120.0 4 0.25 40.3 14.9 7.2 120.0 4 0.25 38.4 15.2 8.9 100.0 5 0.3 37.6 14.9 9.3 80.0 5 0.2 36.3 12.8 10.3 90.0 END
b) The fan format:
A scenario fan serves as input for the scenario tree construction but it can be used also for the scenario reduction. The scenario fan represents a special form of a scenario tree, where we consider individual scenarios merged to a collective root node (the root node can also be viewed here as some kind of artificial node).
Accordingly, the fan input file is a formated data file including all information of the scenarios in individual form now. It must have a similar header with dimension information and the scenario data separated now for each scenario. The header gets the type declaration FAN instead of TREE and includes the number of scenarios, the number of time periods, and the number of random values. The data part is opened again with the DATA key word.
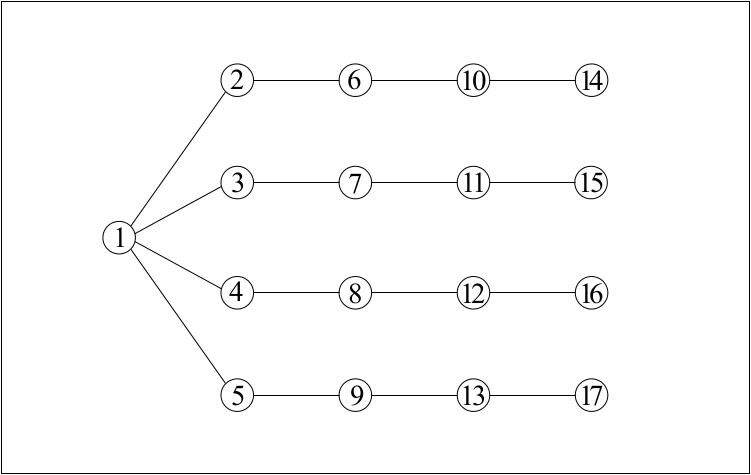
Every scenario is specified by a dataset including the scenario probability first followed by the different random values in ascending order w.r.t. time periods. All entries must be separated by a white space. Comment lines can be placed by the star and route symbols again. Note that in case of having an undetermined root node the mean of random values will taken for the first time period to appoint a unique root node. The example tree represented as input in scenario fan format is displayed in the next example.
Example:
# input fan example for scenred TYPE FAN TIME 5 SCEN 4 RANDOM 4 DATA 0.2500 42.5 9.1 7.5 120.0 39.8 11.2 8.4 90.0 37.6 14.0 6.3 110.0 38.9 12.4 8.1 130.0 40.3 14.9 7.2 120.0 0.2500 42.5 9.1 7.5 120.0 39.8 11.2 8.4 90.0 37.6 14.0 6.3 110.0 38.9 12.4 8.1 130.0 38.4 15.2 8.9 100.0 0.3000 42.5 9.1 7.5 120.0 39.8 11.2 8.4 90.0 37.6 14.0 6.3 110.0 35.7 13.8 7.5 120.0 37.6 14.9 9.3 80.0 0.2000 42.5 9.1 7.5 120.0 39.8 11.2 8.4 90.0 37.6 14.0 6.3 110.0 35.7 13.8 7.5 120.0 36.3 12.8 10.3 90.0 END
Note that even though all scenarios coincide at the first three time periods, in this example, the scenarios will represented by one node each for every time period by the fan input format. The exception is the first time period, where a unique root node is expected in general and, therefore, only one node is assigned. The following picture shows the structure of the scenario fan which is generated by the example input.
Data Export
Scenred2 allows to export scenario data after computing the scenario reduction or scenario tree construction to external data files. Data export is available for both the Gams and the command line interface. To export data from Scenred2 two output options out_tree and out_scen can be use. These options generate data files according to the tree and fan format, respectively. The name of the data files will be specified in the SR-Command-File. When using the Gams interface the options must be connected by activating the corresponding ScenRedParms parameter, additionally.
A Simplified Interface to Scenred2: $libinclude runscenred2
While the previously described interface between GAMS and Scenred2 provides a maximum of flexibility, it also is rather complex and error-prone. The GAMS utility runscenred2 tries to hide most of the mechanics of the GAMS/Scenred2 interface. The call to runscenred2 looks as follows:
$libInclude runscenred2 myprefix tree_con n tree p rtree rp rv1 rv2
Table: runscenred2 Arguments:
| Argument | Description | |
|---|---|---|
| 1 | myprefix | base name for files used with Scenred2 |
| 2 | tree_con or scen_red | select Scenred2 action: tree construction or scenario reduction |
| 3 | n | the set of nodes in the tree |
| 4 | tree | the set of ancestor relations describing the tree |
| 5 | p | the parameter containing the node probabilities |
| 6 | rtree | the set of ancestor relations of the reduced tree (output) |
| 7 | rp | the parameter containing the node probabilities for the reduced tree (output) |
| 8 | rv1, rv2, ... | parameters containing random values of the nodes |
The table above describes the arguments of the runscenred2 call. Arguments 3, 4, 5, 8 and following correspond to the symbols that need to be exported to the Scenred2 data input file (done with the execute_unload call in the complex interface). The output arguments 6 and 7 correspond to the symbols imported from te Scenred2 data output file (done with the execute_load call in the complex interface). The parameters ScenRedParms and ScenRedReport are invisibly communicated with Scenred2.
The second argument instructs Scenred2 either to construct a tree (tree_con) or to reduce a tree (scen_red).
Instead of providing an explicit name for all the different files in the Scenred2 command file, the first argument determines the name of all files using a simple naming scheme. The following name scheme is observed:
| Filename | Command option | Description |
|---|---|---|
sr2myprefix.log | log_file | log file name |
sr2myprefix_in.gdx | input_gdx | gdx input file name |
sr2myprefix_out.gdx | output_gdx | gdx output file name |
sr2myprefix.opt | sr_option | option file name |
sr2myprefix_vi.plt | visual_init | file name for visualization of input tree |
sr2myprefix_vr.plt | visual_red | file name for visualization of reduced/constructed tree |
sr2myprefix_plot.plt | plot_scen | file name for visualization of scenario process |
sr2myprefix_raw.dat | out_scen | file name for scenario data output in fan format |
sr2myprefix_tree.dat | out_tree | file name for scenario data output in tree format |
The first three files (log_file, input_gdx and output_gdx) are always used. The only optional input file sr_option is read by Scenred2 if ScenRedParms('sroption')=1. When you create this file, make sure to use the proper file name. The output files are created by Scenred2 if the corresponding option is set to 1 in ScenRedParms, e.g. ScenRedParms('out_tree')=1.
In addition to a simpler communication of data between GAMS and Scenred2, the newer versions of GAMS/Scenred2 (starting with GAMS distribution 23.1) release the user of setting required fields in the ScenRedParms parameter: num_time_steps, num_leaves, num_nodes, and num_random. GAMS/Scenred2 calculates these numbers from its input data. In case the user still sets these fields, Scenred2 will ensure that the internally calculated numbers and the user provided numbers match.